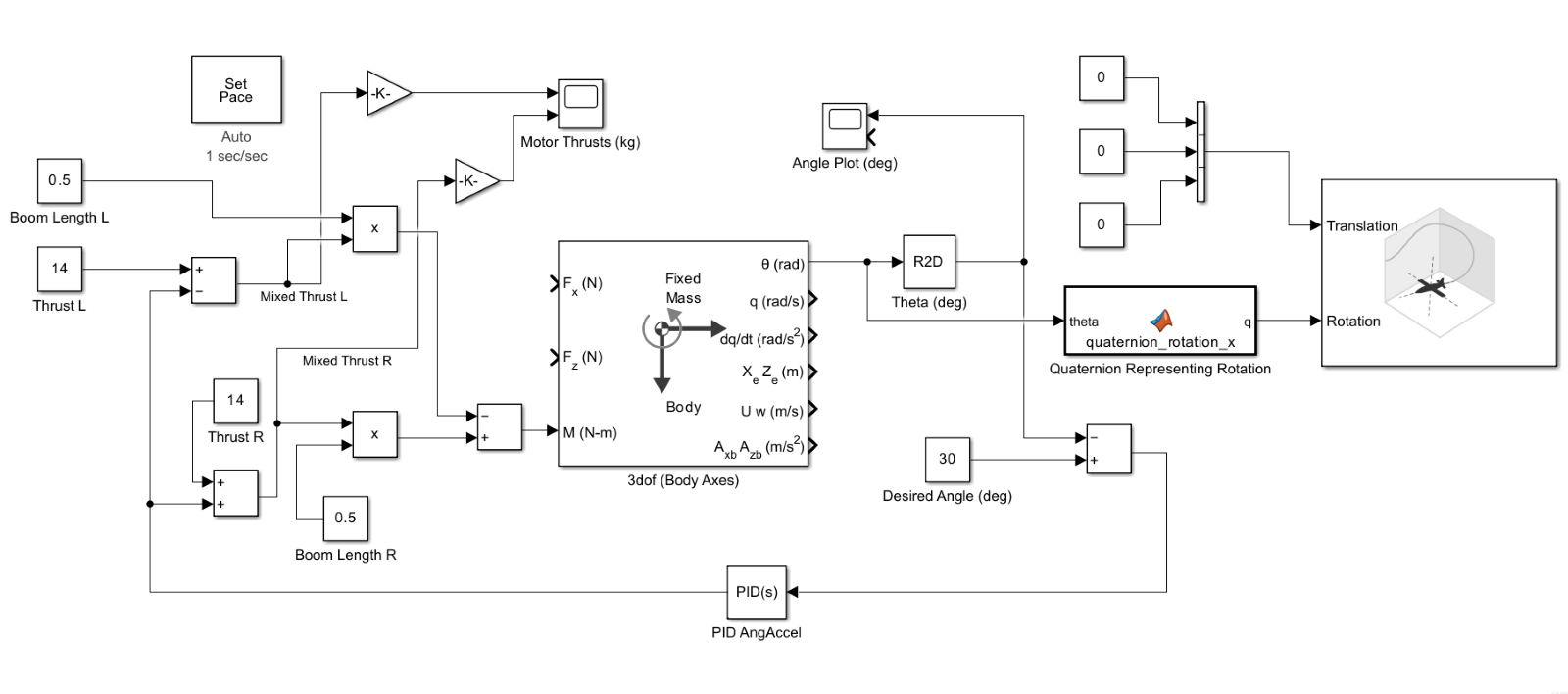
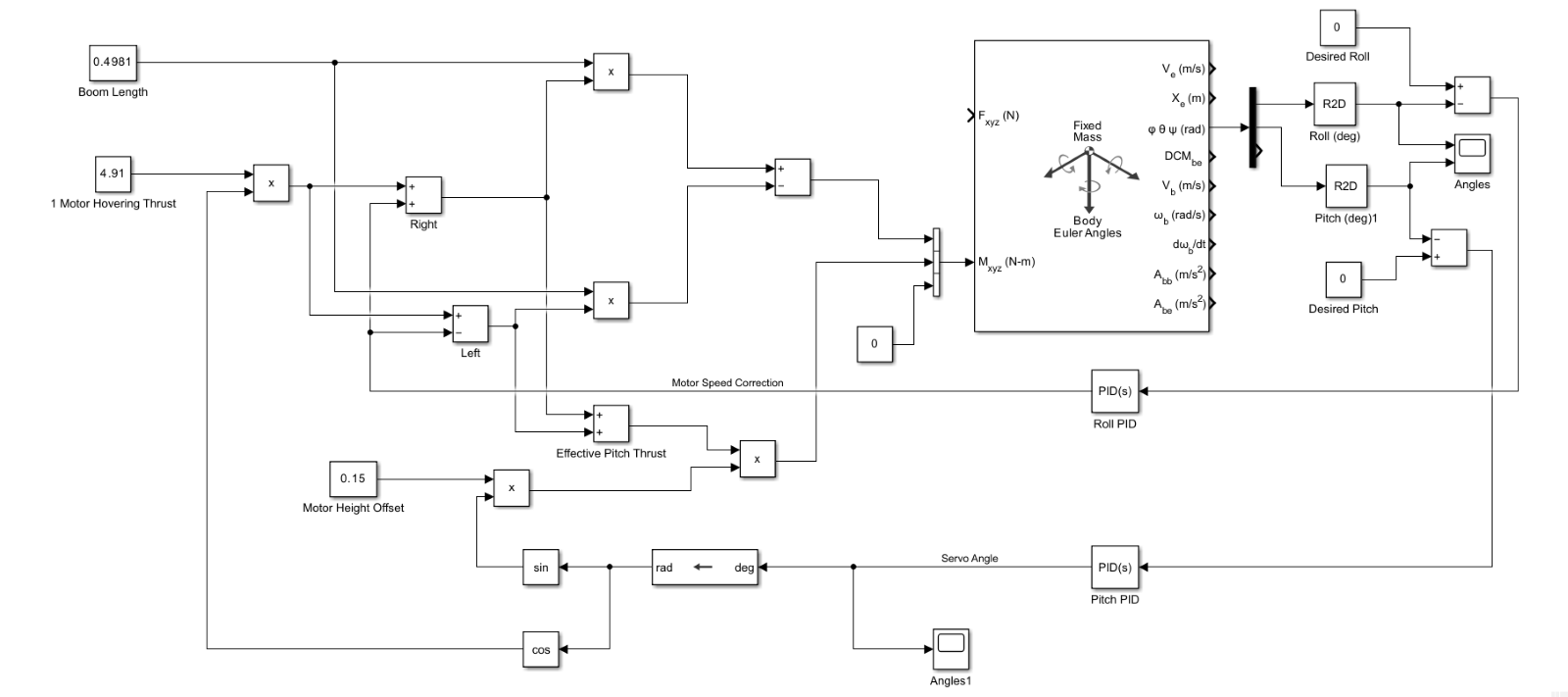
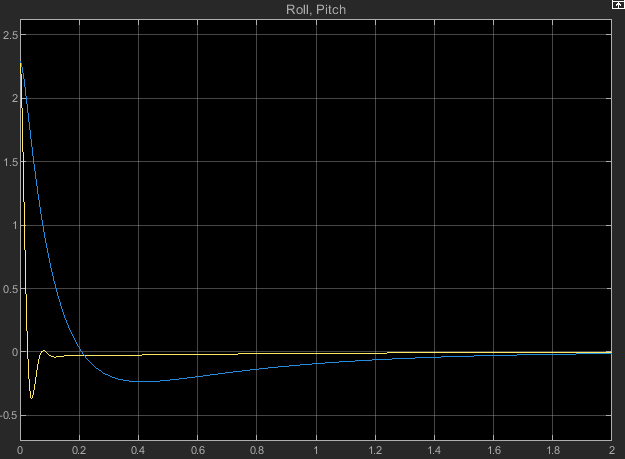
Our simulation section provides a detailed approach to creating rudimentary models of bi-copter dynamics in Simulink using corresponding equations of motion. The goal was to ultimately validate the idea that we could linearly combine control corrections in 2 axes for small corrections to achieve a stabilized hover. This process begins with single-axis testing for roll and pitch and gradually advances to more complex two-axis testing, ensuring a systematic understanding of the vehicle's behavior under different conditions.
Simulation