Thorondor Mk0
For the first sprint we decided to make a ground test vehicle (ironbird) to test the acutation and control of our propellors.
An RC Bicopter Built in 6 Weeks
Thorondor is a tiltrotor bicopter built by 5 students from the Olin College of Engineering and Babson College in 6 weeks for their Principles of Integrated Engineering Final. The project was built in 6 weeks with a budget of 250 dollars. This unique airframe was controlled by a custom flight controller running on a Rasberry Pi Pico. The airframe was primarely constructed from carbon fiber tubes, lasercut MDF, and 3D printed parts.
Test Flight with a safety harness that is not in tension. The aircraft has a tether to recieve debug information from the flight controller.
For the first sprint we decided to make a ground test vehicle (ironbird) to test the acutation and control of our propellors.
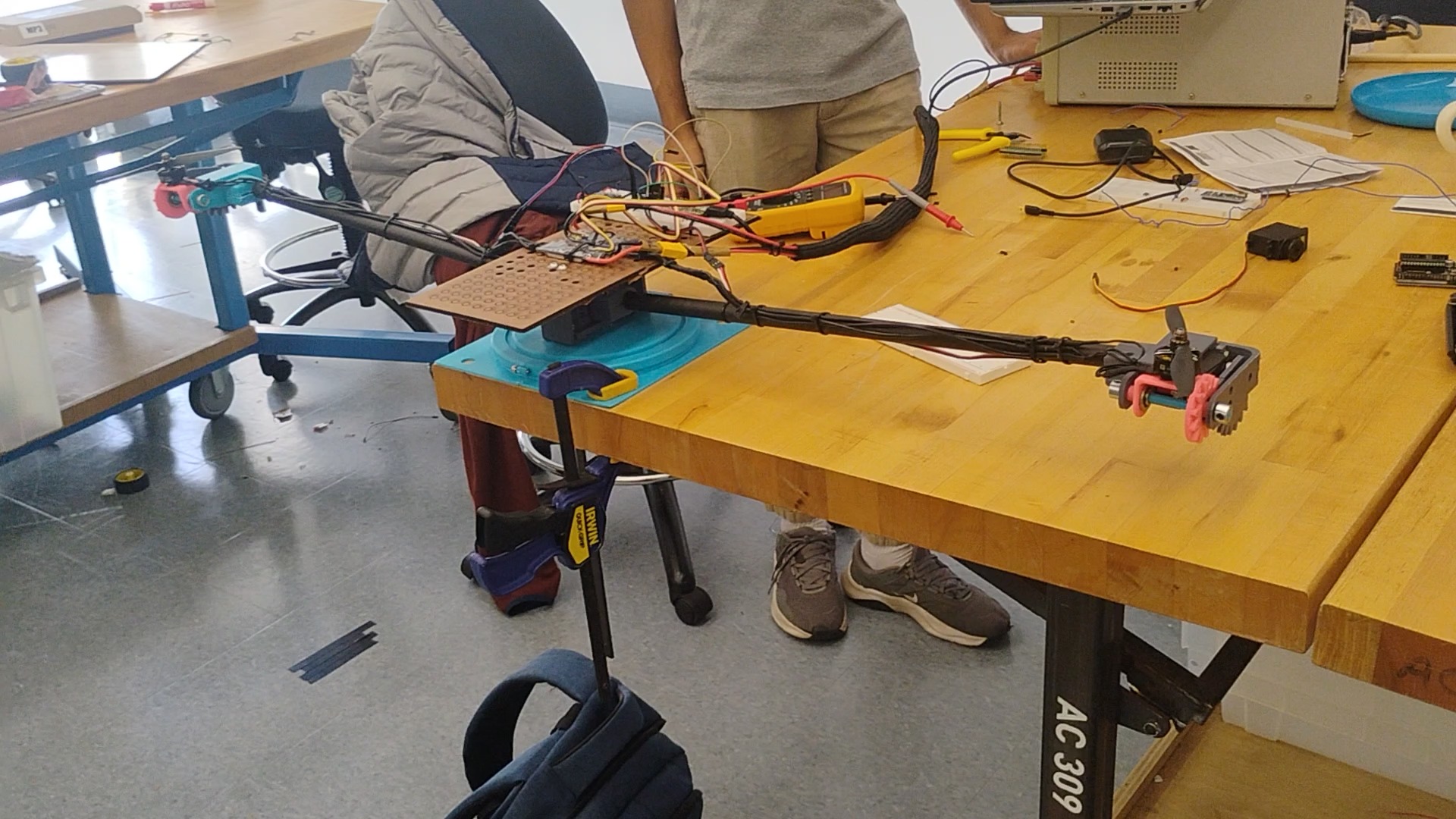
We chose to first work on stabalizing in the roll direction as it was the simplest axis to control, and it would give time for the Nacell actuation system to be iterated upon. After extensive tuning we were able to stabalize at a given setpoint.
Achieving Pitch stabalization was far more difficult than roll stabalization due to the control not being differential, like the roll axis is. Due to our ground testing being preformed with a standard powersupply we found ourselves frequently current limiting our motors. After lots of tuning, we were able to achieve coarse stabalization in the pitch axis.
Our first flight viechle included a completely redesigned nacell system and a perfboard based avionics. The design aimed to maximaze modulatity and ease of repair. However the additional mass along with faulty propellers prevented the plane from being able to take off.
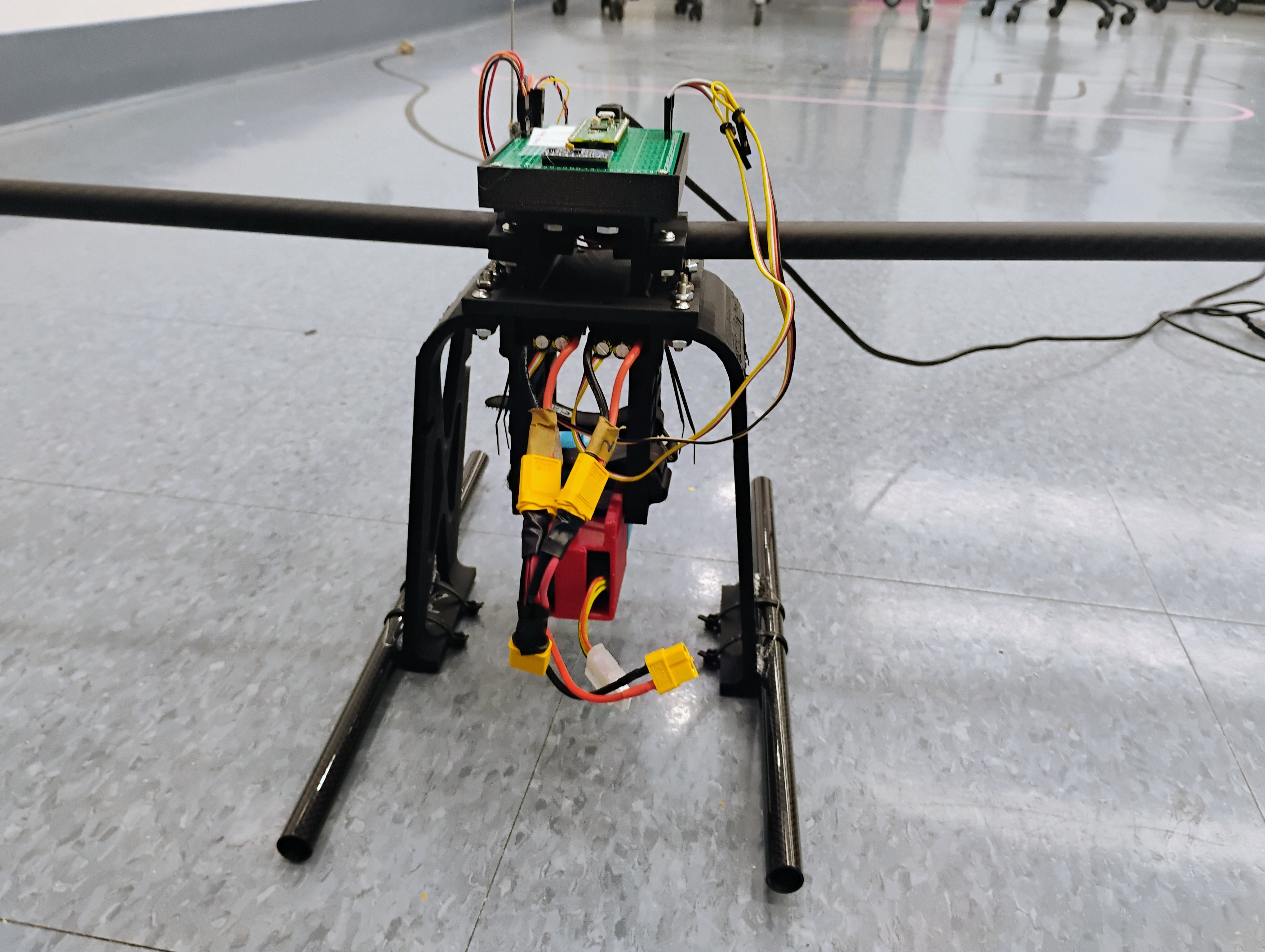
Our final flight vehicle included a fully redesigned airframe along with the correct design of propellers and was able to achieve short flights. Insuffecient computing power and not enough momentum in the pitch axis prevented the craft from being fully stable.
