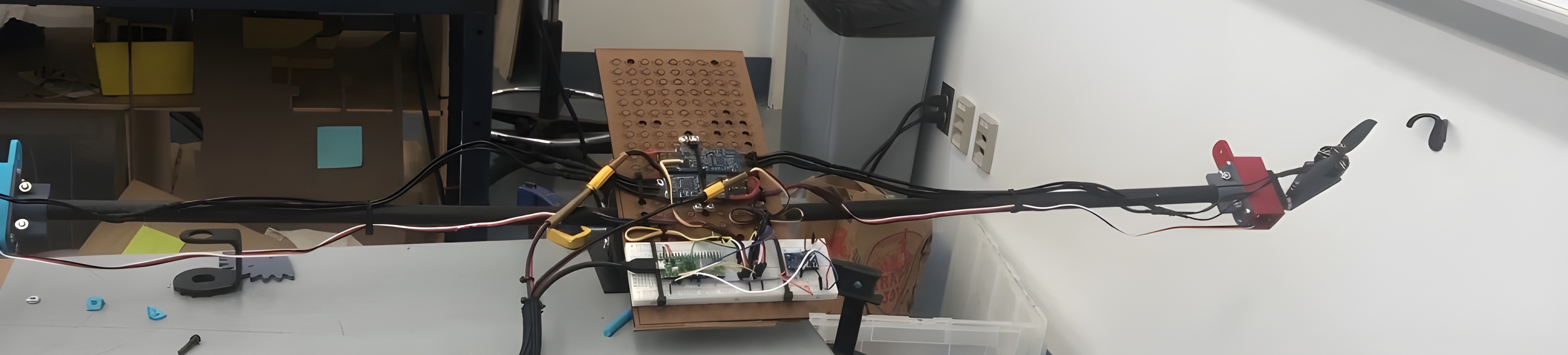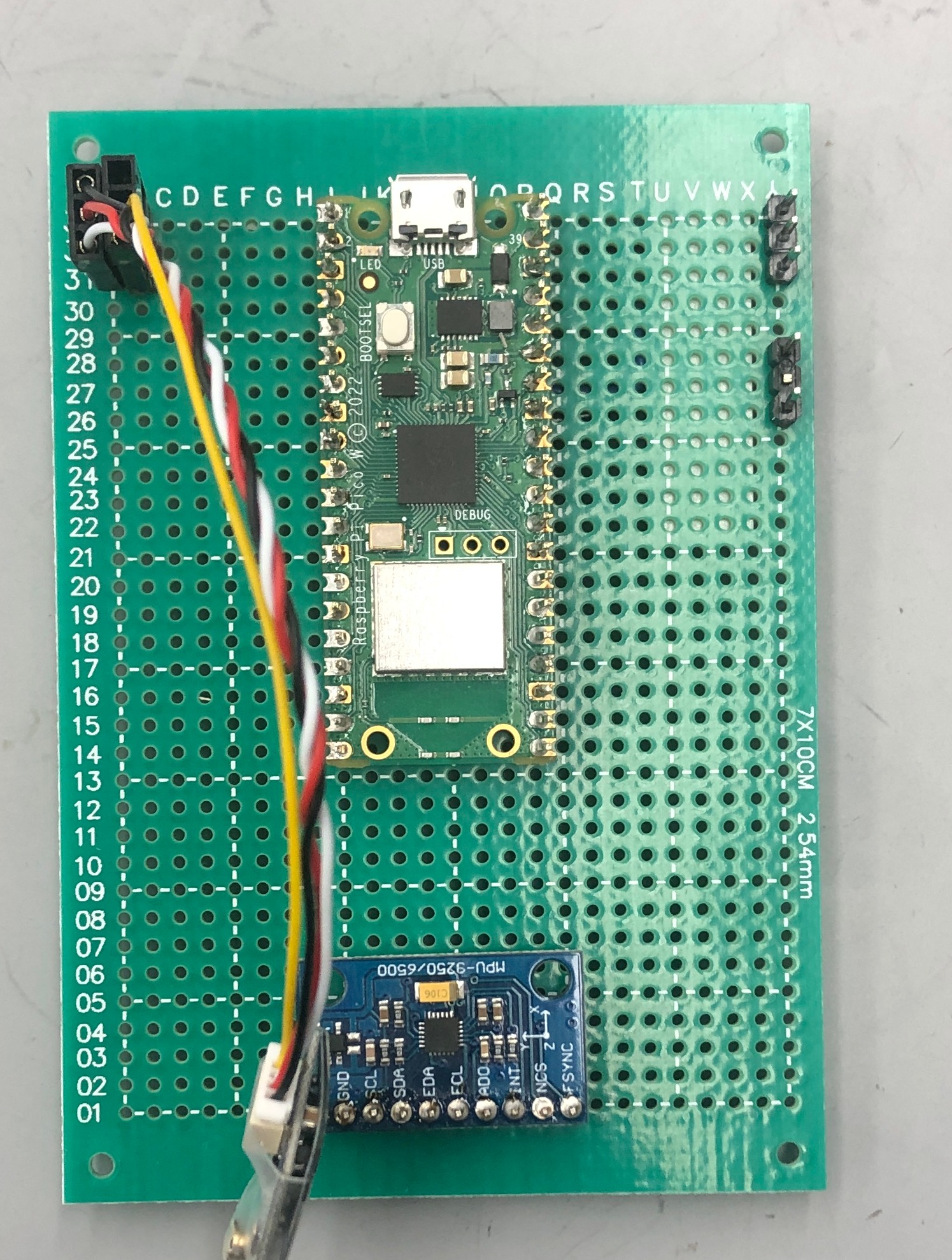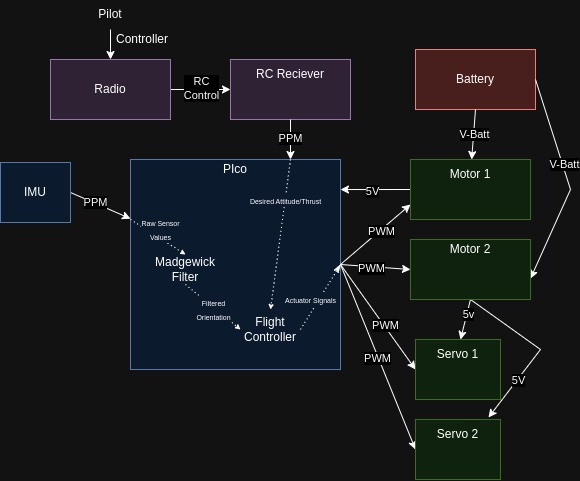
The Avionics is responsible for controlling and powering all actuators on the aircraft as well as recieving radio commands from the pilot. Power from the batteris is stepped down by the ESC's for use by the microcontroller and servos. The ESC's Buck converters have a far higher efficency compared to a linear regulator when stepping down from 14.8V battery power to 5Vs. A Rasbeery Pi-Pico microcontroller is responsible for filtering sensor data and running the flight controller. We chose a Pico due to it's superior preformance compared to an At-Mega powered MCU, and it's low price in comparison to other premium microcontrollers such as the teensy. In retrospect a more power microcontroller should have been selected to ensure higher loop rates.